L’objectif premier, c’est de pouvoir câbler de petite série de cartes électronique sans faire appel à la sous-traitance ou encore, sans avoir à investir des dizaines de milliers d’euros dans une ligne d’assemblage CMS. Puis dans un second temps, c’est un véritable challenge technique que de se lancer dans un tel projet, car cela demande une bonne connaissance en mécanique, électronique, mais aussi en développement logiciel. On y reviendra plus loin. En termes de précision, la machine est capable de placer des boîtiers TQFP au pas de 0.5, jusqu’au 0603. Le 0402 est possible, mais dans certaines conditions.
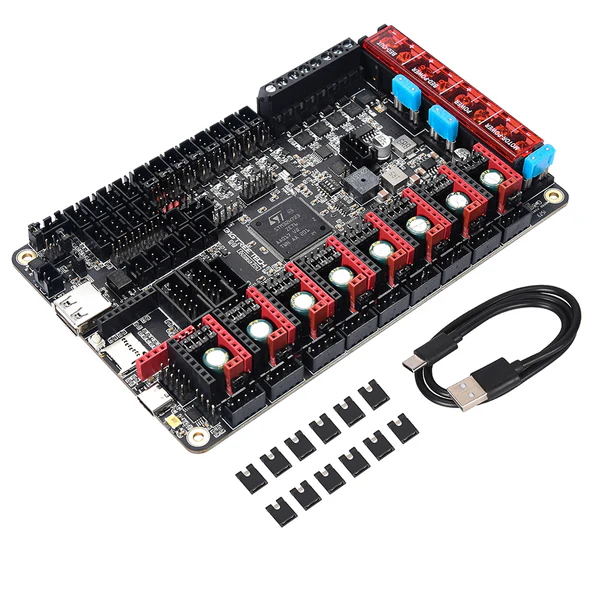
Pour piloter l’ensemble de la machine, moteurs, LED, tool changer, électrovannes, caméras, je suis parti sur une carte du marché capable de piloter jusqu’à 8 moteurs. Mon choix s’est porté sur la BIGTREETECH BTT Octopus Pro V1.0 (image ci-dessous). Elle est capable de contrôler 8 moteurs, plein d’entrées pour les contacts fin de courses, des sorties mosfet et un super microcontrôleur STM32H723. Côté logiciel embarqué, je suis parti sur une base GRBL, à laquelle j’ai rajouté un 4ème et 5ème axes car, à la base il n’en pilote que 3. J’ai retouché toute la partie communication afin d’être compatible avec le logiciel OPENPNP, j’ai ajouté une gestion “intelligente” des sorties afin de piloter les électrovannes avec de timings précis. En effet la prise du composant par aspiration doit être suivie lors de la pose par une expulsion brève (quelques ms) d’air pour éviter qu’il ne reste “collé” à la tête lorsque la dépression s’arrête.
Développement C++ / QT
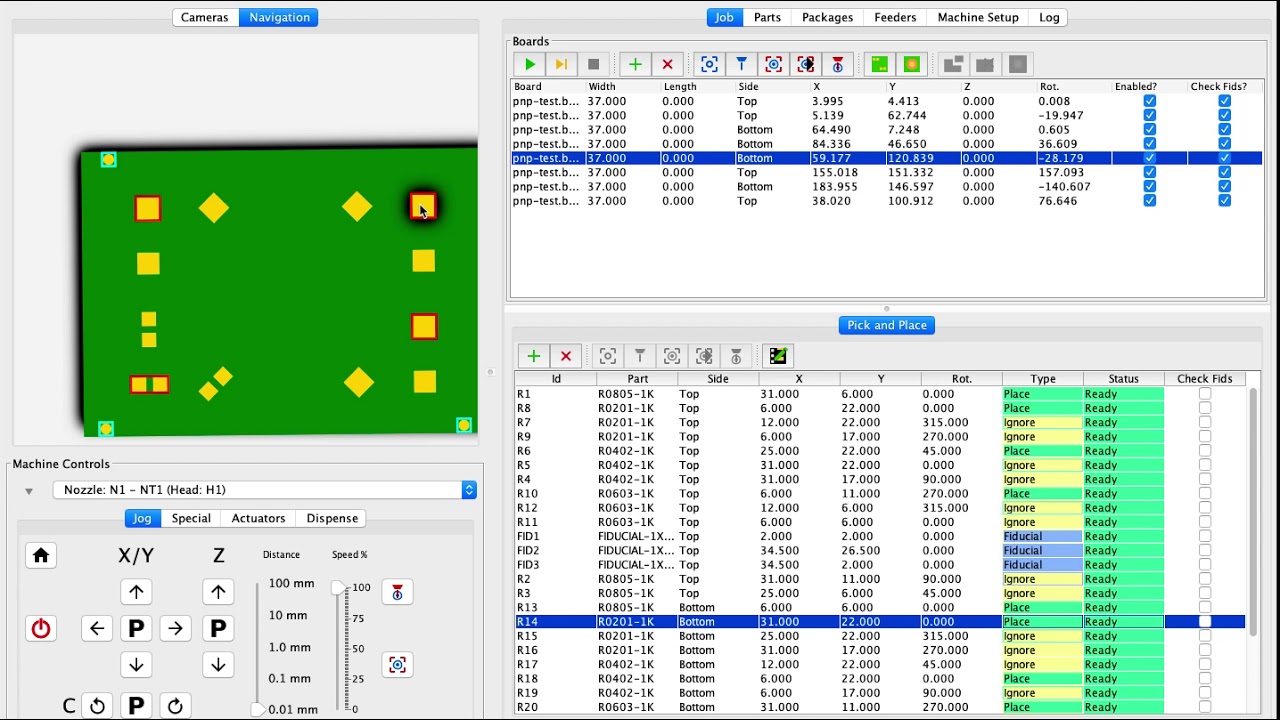
Pas de dev en C++ sur ce projet. Seulement l’utilisation du logiciel OpenPNP développé en Java.
Ce logiciel en maintenu pas une grosse communauté et donne de très bon résultat à l’utilisation.
Electronique
Pas de développement électronique sur ce projet à proprement parlé pour le moment. Mais surement une version dédiée au PNP vera le jour si le besoin s’en fait ressentir. Pour les tests, j’utilise une carte de BIGTREETECH BTT Octopus Pro V1.0 (image ci-dessous). Elle utilise un µC STM32F7 assez puissant pour piloter l’ensemble de la machine. Elle est à la base destinée aux machines d’impression 3D, mais convient parfaitement pour ce type de machine.
Mécanique
C’est le gros dossier sur ce projet.
Je travaille depuis plusieurs années sur FUSION360, c’est naturellement que ce projet a vu le jour grâce à ce logiciel. La machine reste simple, robot cartésien X/Y et un axe Z supportant 2 têtes équipées de buses JUKI. Le déplacement est confié à 2 moteurs pas à pas pour l’axe Y, 1 pour l’axe X et 1 pour les 2 têtes (quand une descend l’autre monte et vice-versa).
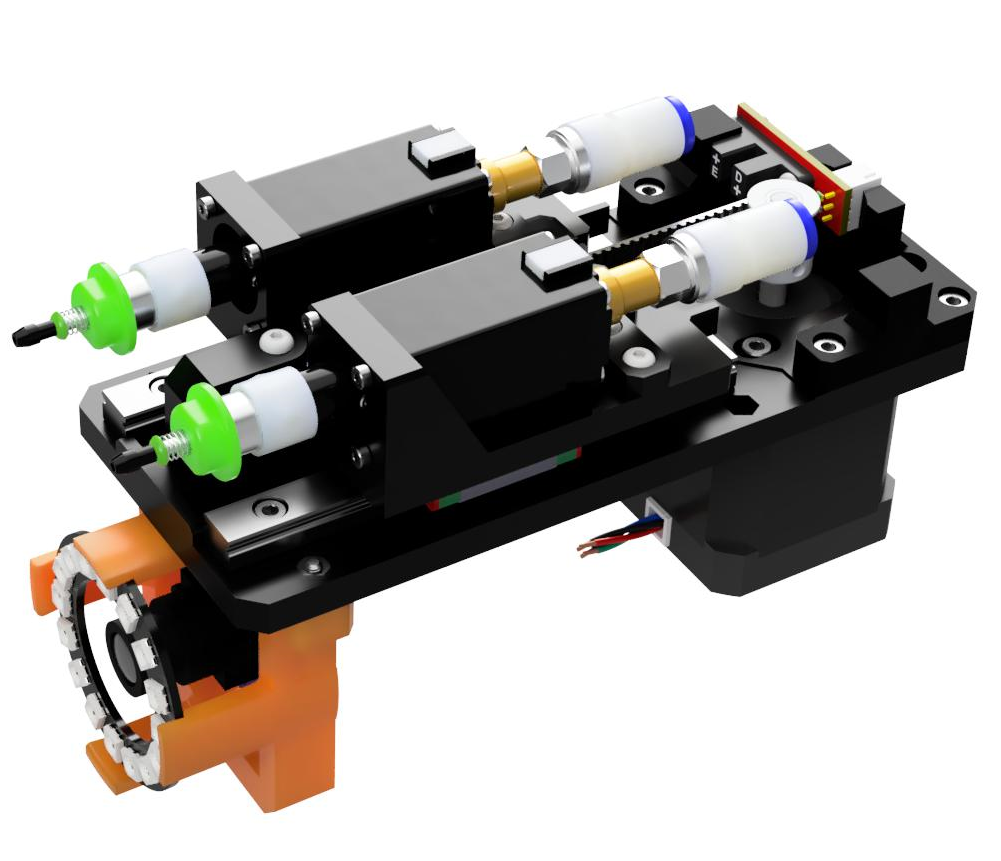
Voici un aperçu des 2 têtes :
On note en dessous la camera down vision avec son “cercle” de lumière LED. La rotation des deux têtes est assurée par 2 moteurs pas à pas NEMA8. Les axes des moteurs sont creux afin de laisser passer la dépression qui servira à “aspirer” le composant au bout des 2 nozzles JUKI. Certaines pièces sont en impression 3D ABS et d’autre en usinage aluminium avec une anodisation noire et un sablage léger.
A coté, on notera le changement d’outil automatique avec 6 buses spécifiques pour venir “aspirer” des composants de differentes formes et grosseurs.
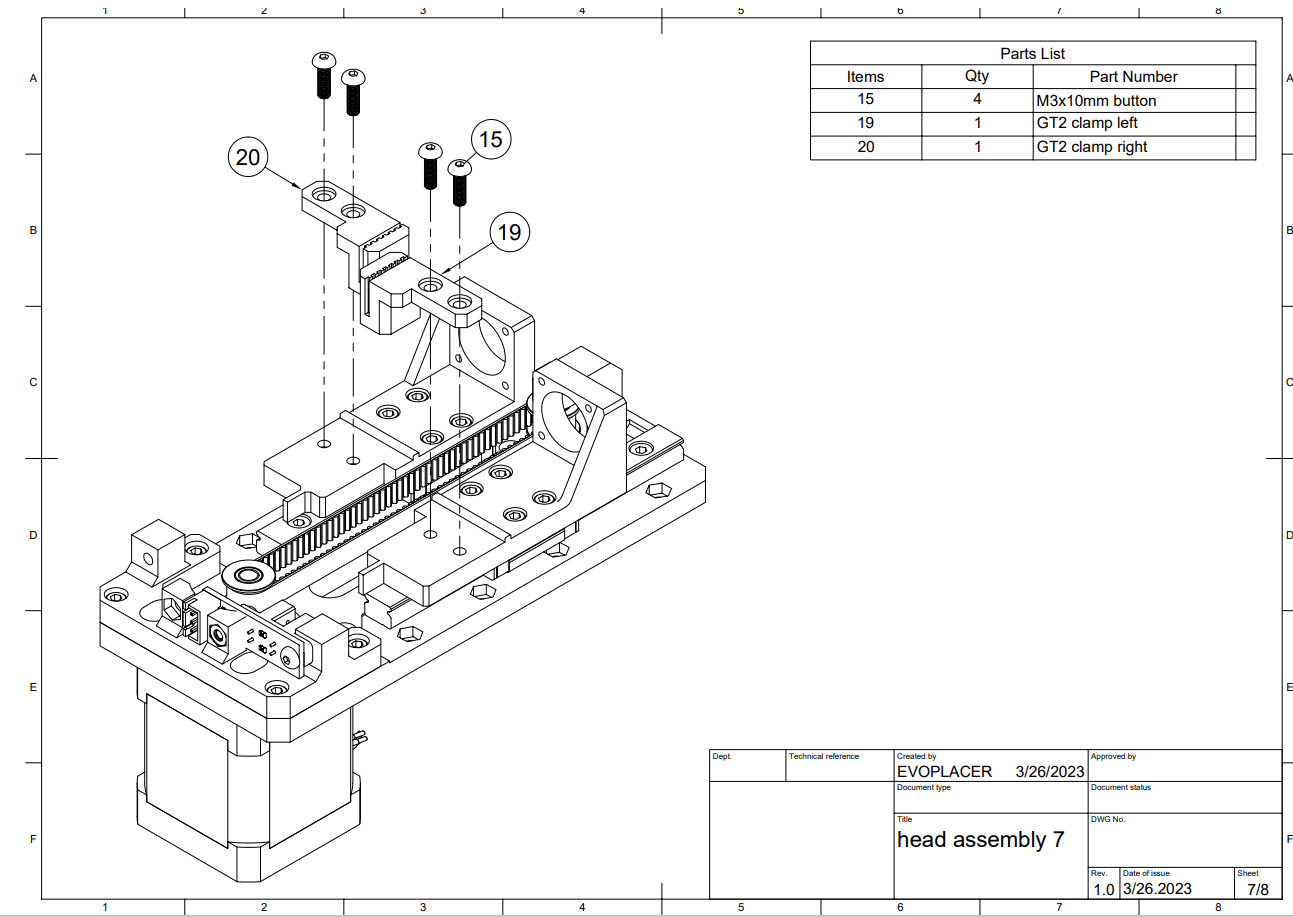
Ci-dessous une documentation (réalisée avec Fusion360) du montage de la machine vient compléter le projet.